

|
店鋪基本資料信息
|
|||||||||||||||||||||||||
| 項目 | 單位 | 規格 | ||
|---|---|---|---|---|
| 產品名稱 | - | VS-050 | VS-060 | |
| 軸數 | - | 6 | ||
| 位置檢測方式 | - | **編碼器 | ||
| 驅動電機、制動器 | - | 帶全軸AC伺服電機 + 全軸制動器 | ||
| 機械臂全長(第1臂 + 第2臂) | mm | 505(250+255) | 605(305+300) | |
| *大動作領域(P點) | 505 | 605 | ||
| 動作角度 | J1 | ° | ±170(*4) | |
| J2 | ±120 | |||
| J3 | +151,-120 | +155,-125 | ||
| J4 | ±270 | |||
| J5 | ±120(*5) | |||
| J6 | ±360 | |||
| *大可搬運質量 | kg | 4 | ||
| 合成*大速度(工具安裝面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準循環時間(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 重復定位精度(工具安裝面中心)(*2) | mm | ±0.02 | ||
| *大容許慣性力矩 (慣性) |
J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| *大容許力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 信號線、氣動配管電磁閥 (選件) |
信號線 | - | 10芯(近接傳感器等的信號線)(*6)(*7) | |
| 氣動配管電磁閥(*3) | - | 5系統(φ4×4,φ4×1) 電磁閥(2位置、雙電磁閥)×2 |
||
| 通信電纜法蘭規格-A(選件) | - | 17芯(攝像機等的電源線)(*7) | ||
| - | LAN×1(1000BASE-T)(*8) | |||
| 空氣源 | 常用壓力 | Mpa | 0.20~0.39 | |
| *大容許壓力 | 0.49 | |||
| 空氣傳播噪音(A加權等效連續聲壓級) | dB | 65以下 | ||
| 保護等級 | - | IP40 | ||
| 質量 | kg | 約27 | 約28 | |
| 項目 | 單位 | 規格 | ||
|---|---|---|---|---|
| 產品名稱 | - | VS-050 | VS-060 | |
| 軸數 | - | 6 | ||
| 位置檢測方式 | - | **編碼器 | ||
| 驅動電機、制動器 | - | 帶全軸AC伺服電機 + 全軸制動器 | ||
| 機械臂全長(第1臂 + 第2臂) | mm | 505(250+255) | 605(305+300) | |
| *大動作領域(P點) | 505 | 605 | ||
| 動作角度 | J1 | ° | ±170(*4) | |
| J2 | ±120 | |||
| J3 | +151,-120 | +155,-125 | ||
| J4 | ±270 | |||
| J5 | ±120 | |||
| J6 | ±360 | |||
| *大可搬運質量 | kg | 4 | ||
| 合成*大速度(工具安裝面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準循環時間(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 重復定位精度(工具安裝面中心)(*2) | mm | ±0.02 | ||
| *大容許慣量(慣性力矩) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| *大容許力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 信號線、氣動配管電磁閥(選件) | 信號線 | - | 10芯(近接傳感器等的信號線)(*5) | |
| 氣動配管電磁閥(*3) | - | 5系統(φ4×4,φ4×1) 電磁閥(2位置、雙電磁閥)×2 |
||
| 空氣源 | 常用壓力 | Mpa | 0.20~0.39 | |
| *大容許壓力 | 0.49 | |||
| 空氣傳播噪音(A加權等效連續聲壓級) | dB | 65以下 | ||
| 保護等級 | - | IP54(手腕部IP65) | ||
| 質量 | kg | 約27 | 約28 | |
| 項目 | 單位 | 規格 | ||
|---|---|---|---|---|
| 產品名稱 | - | VS-050 | VS-060 | |
| 軸數 | - | 6 | ||
| 位置檢測方式 | - | **編碼器 | ||
| 驅動電機、制動器 | - | 帶全軸AC伺服電機 + 全軸制動器 | ||
| 機械臂全長(第1臂 + 第2臂) | mm | 505(250+255) | 605(305+300) | |
| *大動作領域(P點) | 505 | 605 | ||
| 動作角度 | J1 | ° | ±170 | |
| J2 | ±120 | |||
| J3 | +151,-120 | +155,-125 | ||
| J4 | ±270 | |||
| J5 | ±120 | |||
| J6 | ±360 | |||
| *大可搬運質量 | kg | 4 | ||
| 合成*大速度(工具安裝面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準循環時間(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 重復定位精度(工具安裝面中心)(*2) | mm | ±0.02 | ||
| *大容許慣量(慣性力矩) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| *大容許力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 通信電纜法蘭規格-A(選件) | 信號線 | - | 10芯(近接傳感器等的信號線)(*4) | |
| 氣動配管電磁閥(*3) | - | 4系統(φ4×4) 電磁閥(2位置、雙電磁閥)×2 |
||
| 空氣源 | 常用壓力 | Mpa | 0.20~0.39 | |
| *大容許壓力 | 0.49 | |||
| 空氣傳播噪音 | dB | 65以下 | ||
| 凈化度(ISO14644-1) | - | ISO等級3 | ||
| 質量 | kg | 約27 | 約28 | |
| 項目 | 單位 | 規格 | ||
|---|---|---|---|---|
| 產品名稱 | - | VS-050 | VS-060 | |
| 軸數 | - | 6 | ||
| 位置檢測方式 | - | **編碼器 | ||
| 驅動電機、制動器 | - | 帶全軸AC伺服電機 + 全軸制動器 | ||
| 機械臂全長(第1臂 + 第2臂) | mm | 505(250+255) | 605(305+300) | |
| *大動作領域(P點) | 505 | 605 | ||
| 動作角度 | J1 | ° | ±170 | |
| J2 | ±120 | |||
| J3 | +151,-120 | +155,-125 | ||
| J4 | ±270 | |||
| J5 | ±120 | |||
| J6 | ±360 | |||
| *大可搬運質量 | kg | 4 | ||
| 合成*大速度(工具安裝面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準循環時間(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 重復定位精度(工具安裝面中心)(*2) | mm | ±0.02 | ||
| *大容許慣量(慣性力矩) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| *大容許力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 通信電纜法蘭規格-A(選件) | 信號線 | - | 10芯(近接傳感器等的信號線)(*4) | |
| 氣動配管電磁閥(*3) | - | 4系統(φ4×4) 電磁閥(2位置、雙電磁閥)×2 |
||
| 空氣源 | 常用壓力 | Mpa | 0.20~0.39 | |
| *大容許壓力 | 0.49 | |||
| 空氣傳播噪音 | dB | 65以下 | ||
| 凈化度(ISO14644-1) | - | ISO等級5 | ||
| 質量 | kg | 約27 | 約28 | |
| 項目 | 單位 | 規格 | ||
|---|---|---|---|---|
| 產品名稱 | - | VS-050 | VS-060 | |
| 軸數 | - | 6 | ||
| 位置檢測方式 | - | **編碼器 | ||
| 驅動電機、制動器 | - | 帶全軸AC伺服電機 + 全軸制動器 | ||
| 機械臂全長(第1臂 + 第2臂) | mm | 505(250+255) | 605(305+300) | |
| *大動作領域(P點) | 505 | 605 | ||
| 動作角度 | J1 | ° | ±170(*4) | |
| J2 | ±120 | |||
| J3 | +151,-120 | +155,-125 | ||
| J4 | ±270 | |||
| J5 | ±120 | |||
| J6 | ±360 | |||
| *大可搬運質量 | kg | 4 | ||
| 合成*大速度(工具安裝面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準循環時間(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 重復定位精度(工具安裝面中心)(*2) | mm | ±0.02 | ||
| *大容許慣量(慣性力矩) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| *大容許力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 信號線、氣動配管電磁閥(選件) | 信號線 | - | 10芯(近接傳感器等的信號線)(*5) | |
| 氣動配管電磁閥(*3) | - | 5系統(φ4×4,φ4×1) 電磁閥(2位置、雙電磁閥)×2 |
||
| 空氣源 | 常用壓力 | Mpa | 0.20~0.39 | |
| *大容許壓力 | 0.49 | |||
| 空氣傳播噪音(A加權等效連續聲壓級) | dB | 65以下 | ||
| 保護等級 | - | IP67(*6) | ||
| 質量 | kg | 約27 | 約28 | |
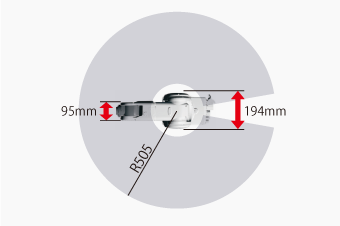
底座安裝面積及機器臂各部分的寬度較小。因此,即使在狹窄的空間內也能靈活地移動。
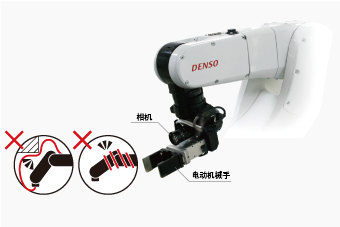
在法蘭頂端(6軸部)設有17芯信號線和以太網端口的選配件。由此,可在法蘭頂端連接電動手和相機,而無需擔心電纜纏住或斷線的問題。
品類齊全
省心省力,一站購齊
一對一客服
選型詢價,快速響應
貨期保障
多倉直發,貨期無憂
正品貨源
正品保障,誠信服務
 在線客服
在線客服
 企業微信
企業微信







 [VIP第5年] 指數:1
[VIP第5年] 指數:1










